
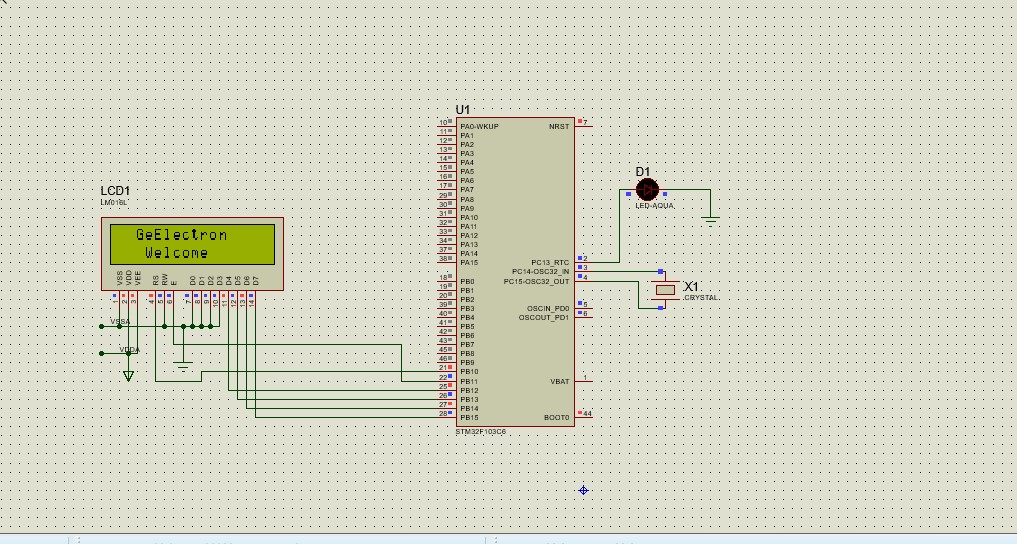
16x2 LCD Interfacing with STM32,STM32F103C6
lcd_init();
LCD_LINE1;
lcd_String(" GeElectron");
LCD_LINE2;
lcd_String(" Welcome");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13, GPIO_PIN_SET);// LCD Enable PIN to High
HAL_Delay(500);
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13, RESET);
HAL_Delay(500);
// lcd_String("Hello");
}
/* USER CODE END 3 */
}
LCD.c File
/*
* lcd.c
*
* Created on: Sep 30, 2023
* Author: Geelabs
*/
#include "stm32f1xx_hal.h"
#include "lcd.h"
#include "main.h"
extern void Delay_Us (uint16_t us);
void lcd_Strobe(void)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_11, GPIO_PIN_SET);// LCD Enable PIN to High
HAL_Delay(1);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_11, RESET);// LCD Enable High to Low
HAL_Delay(1);
}
void lcd_init(void)
{
HAL_Delay(40);
lcd_cmd(0x03);
HAL_Delay(5);
lcd_cmd(0x03);
HAL_Delay(1);
lcd_cmd(0x03);
HAL_Delay(10);
lcd_cmd(0x02); // Function set --> DL=0 (4 bit mode), N = 1 (2 line display) F = 0 (5x8 characters)
HAL_Delay(1);
lcd_cmd(0x28);
lcd_cmd(0x08);
HAL_Delay(10);
lcd_cmd(0x00);
lcd_cmd(0x01);
HAL_Delay(3);
lcd_cmd(0x00);
lcd_cmd(0x0c); // Make cursorinvisible
lcd_Clear(); // Clear screen
lcd_cmd(0x6); // Set entry Mode(auto increment of cursor)
}
void lcd_cmd(__uint16_t cmd)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10, GPIO_PIN_RESET);
cmd = (cmd << 8) ;
GPIOB->ODR = (cmd & 0xf000);
lcd_Strobe();
cmd = (cmd << 4) ;
GPIOB->ODR = (cmd & 0xf000);
lcd_Strobe();
}
void lcd_data(__uint16_t lcd_data)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10, GPIO_PIN_SET);
lcd_data = (lcd_data << 8) ;
GPIOB->ODR = (lcd_data& 0xf000)|0x400;
lcd_Strobe();
lcd_data = (lcd_data << 4) ;
GPIOB->ODR = (lcd_data & 0xf000)|0x400;
lcd_Strobe();
}
void lcd_Clear(void)
{
lcd_cmd(0x01);
HAL_Delay(5);
}
void lcd_String(const char *ptr) // ptr pointing the address of displaying string
{
while (*ptr) // check weather the endo of file then exit the loop
{
lcd_data(*ptr++); // Sending data to LCD_data functions
}
}











